

Trovare materiali per autocostruzione robotica o meglio meccanica in Italia è quasi impossibile e anche quando (raramente) vengo smentito i costi rendono spesso i progetti più interessanti abbordabili solo nella disponibilità di discrete sommette. Questo spesso mi è di stimolo in progetti più che ridondanti in rete dove aggiungere qualcosa in modo semplice non è facile, così aggiungo il "modo semplice" di fare qualcosa, ma soprattutto il modo più economico per avere disponibile tutto il materiale necessario.
Il problema non è la tibia, è il ginocchio! Già..., la tibia, il femore, l'avambraccio etc., in meccanica diventano nulla più che barrette di alluminio... forme scatolate che consentono l'unione di due "articolazioni": ginocchio -> tibia -> caviglia oppure polso -> avambraccio -> gomito. In parole povere, una volta trovato il modo di realizzare in modo semplice uno snodo, posso tranquillamente realizzare il movimento su qualsiasi asse io voglia. Senza disporre di attrezzature quali CNC e simili è indispensabile partire da materiali e forme quanto più "pronte all'uso" alle quali, con semplici interventi di lima, traforo e trapanino a colonna, faremo assumere la nostra forma ideale.
MATERIALE OCCORRENTE
Sono partito dall'acquisto 4 servi economici, comunissimi Tower Pro MG995 che trovate online intorno alla decina di euro, perchè mi occorrevano delle misure a cui riferirmi, dopodichè ho acquistato da Bricoman:
- un tubo di alluminio a sezione quadrata da 30x30x1,5mm,
- una piattina di alluminio da 40x2mm,
- una piattina di alluminio da 30x2mm.
In un negozio di elettronica ho acquistato:
- 10pz colonnina esagonale distanziale 3MA 30mm,
- 9pz colonnina esagonale distanziale 3MA 15mm,
- 9pz colonnina esagonale distanziale 3MA 8mm
I cuscinetti li avevo ma li trovate facilmente su ebay a circa 1,50 euro cad. Sono:
- 4 un reggispinta da 10mm con foro da 4mm
- 4 flangiato 8x4x2,5mm
In totale una spesa di 12 euro...15 con la spedizione. Il resto del materiale occorrente sono comunissime viti da 3MA di varie lunghezza e tipologia, vedete un po voi cosa usare, io ho usato quello che avevo in casa. e comunque sono reperibili presso molti negozi di modellismo
Non sperate vi sollevi la bottiglia da un litro, arriverà si e no a portarvi le scarpe, con questi servi e questi costi. Per aumentare le cifre in gioco è necessario cambiare servi se non consigliabile passare a motori ridotti che vi consentiranno molta più forza ...ma anche molto più peso e consumo.
La struttura che ho realizzato è sovradimensionata per la forza che deve esercitare ed è probabile che al primo smontaggio intervengo con operazioni di alleggerimento. Il tempo necessario per la realizzazione è di circa 30 ore e i requisiti sono solamente quelli di una buona manualità, pazienza e un po' di precisione nell'esecuzione di tagli ma soprattutto dei fori.
Se un taglio storto causerà una brutta estetica, un foro impreciso causa disassamenti, sforzi e quindi perdite di potenza e movimenti imprecisi. In fase di assemblaggio procuratevi delle rondelle da usare come correzione alle piccole differenze che inevitabilmente troverete.
Le immagini e qualche commento valgono più di mille inutili spiegazioni. I files con i tracciati per il taglio a misura dei vari pezzi li trovate allegati in fondo.
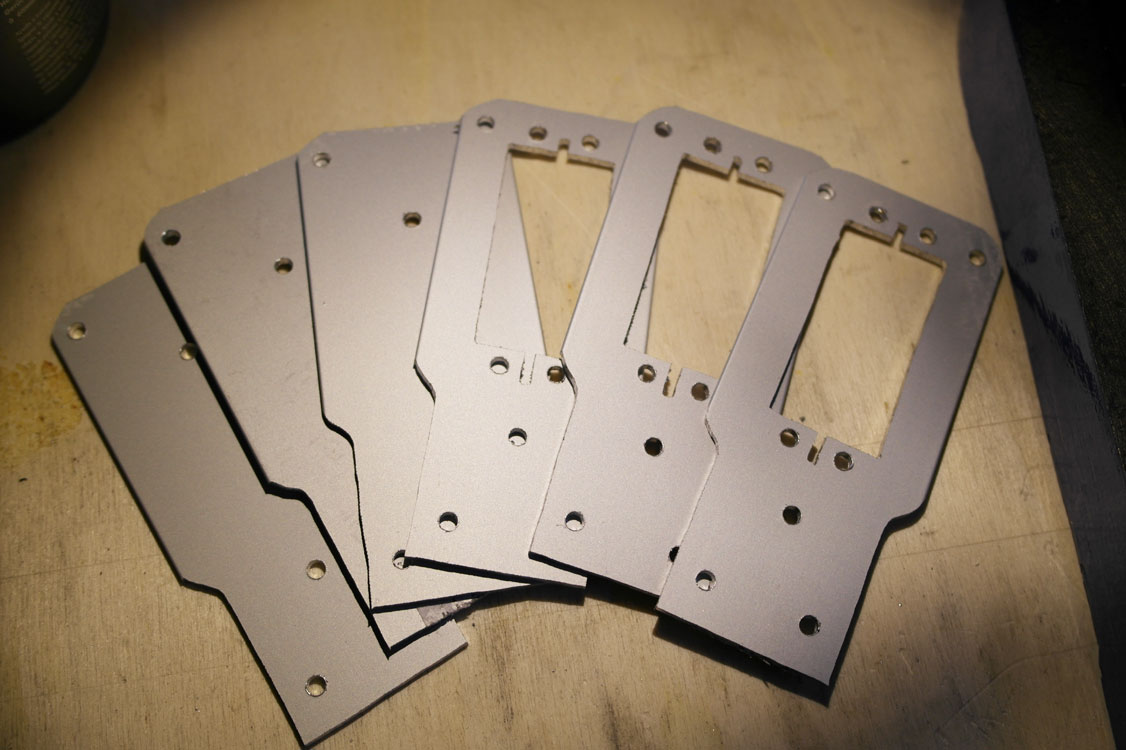
Fase di taglio e sagomatura
Dopo aver stampato nella quantità occorrente i fogli con disegnate le dime di taglio, rendeteli adesivi con del nastro biadesivo senza spessore, dopodichè ritagliateli con un cutter e applicateli sul materiale da sagomare.
Dopo averli tagliati e forati singolarmente (con un diametro leggermente inferiore) rifinite i pezzi impilandoli e stringendo con un paio di vitine provvisorie. Rifiniteli e ripassate i fori con la punta di giusta misura (3,2mm) facendo "girare" le viti che stringono.
il pezzo che serve come squadretta per il servo del braccio terminale è ottenuto tagliando anche lungo le metà dei lati così da avere 4 squadrette di cui ne userete 2. I fori che riguardano il perno andranno allargati a seconda della misura dei cuscinetti e così pure quelli dei braccetti dei servo.







Fase di assemblaggio
Montate per primo il braccio principale, quello con 2 servo, successivamente montate la parte di attacco congiungendola con uno dei due servi del braccio. Il braccio principale porta due servo poichè è meglio averlo ad una distanza minore poichè genera una minore leva e quindi sforzo del servo più sollecitato (partendo dall'attacco il secondo). Cercate di osservare le foto così da capire come ho risolto le piccole differenze di spessore.
Tenete anche presente che la parte del braccetto del servo avrà bisogno di un altezza maggiore di quella della parte del perno, per questo dalla prima parte andranno usate le colonnine da 10mm, mentre dalla parte del perno basteranno quelle da 8mm. Questo riporterà (quasi) al centro l'asse del braccio.



Braccio finito
Sinceramente mi aspettavo un risultato più scadente, invece è... bellissimo! Un leggero gioco generato dai fori per i cuscinetti flangiati da 8mm... era meglio un foro da 7,9 e sforzarli un poco. In vista dell'aggiunta di una pinza come mano ho anche posizionato una piccola videocamera a 2,4Ghz, così da avere un punto di vista direttamente sull'oggetto manipolato.
Oltre la pinza dovrò realizzare alla base un hub per i cavetti dei servo; le alimentazioni sono comuni è solo il segnale che sarà indirizzato quindi, 12 fili diventeranno 6: posiitivo, negativo, 4 segnali; a questi andranno aggiunti quelli della pinza (1 cavo segnale per servo).





Ora non rimane che creare i collegamenti con Arduino e successivamente creare una comunicazione possibilmente wireless o bluetooth, spero di non dover aspettare il prossimo Natale.




