
Volevo costruire un frame da poter portare comodamente ovunque, quindi pieghevole, ma che si prestasse a svariati usi, dal volo fpv al trasporto di una macchina fotografica stabilizzata. Forse pretendo troppo? Non saprei però mi piace costruire per cui non sarà mai tempo buttato. Come sempre i materiali e gli attrezzi utilizzati sono alla portata di chiunque e dai costi molto contenuti.
Non è proprio la stessa cosa per il resto ma ognuno può optare per configurazioni più leggere quindi motori e soprattutto batteria più piccoli. Con il telaio non crediate di guadagnare così tanto in peso usando tubolari in carbonio... Io sono abbastanza restio all'uso del carbonio nella costruzione dei miei frames perchè spesso causa costi non giustificati e dubbi benefici, rendendo la struttura molto "risonante" e secondo me poco propensa allo smorzamento delle vibrazioni. Non è inutile ma va usato in combinazione con alluminio e dedicato a destinazioni d'uso particolari dove anche i 100gr risparmiati possono fare differenza. Diversamente preferisco optare per strutture un po' più massicce e di alluminio sostituendo il carbonio con semplice vetroresina o vetronite, molto più economica, leggermente meno resistente e quasi di pari peso specifico.
Dedicherò al carbonio un articolo a parte perchè vale la pena parlarne visto la scarsa qualità che spesso si trova in commercio, spacciata con caratteristiche lontane da quelle reali che si manifesteranno appena cercate prestazioni dal vostro multirotore.
Ma torniamo ad Eloise... non avendo mai realizzato un frame "H" ed essendo questa figura molto propensa a supportare molti setup, ho deciso di realizzare questa tipologia di telaio che mi consentiva inoltre di ampi spazi in cui posizionare l'elettronica. Quello su cui ho passato molte ore nella valutazione sono stati i motori.
Solitamente non avendo particolari necessità mi accontento di piccole potenze, dei 22/12 da 800 Kv sono la giusta dimensione per il rapporto peso/durata del volo, questa volta volevo qualcosina in più. L'attenzione si è subito focalizzata sui 28/14, anchè perchè di intermedio esiste ben poco.
In partenza avevo optato per la serie "Navigator" di TigerMotor, molto elegante e non così costosa ma troppo pesanti per la resa dichiarata, quando a quasi 15 euro in meno a motore si può puntare su dei DYS 28/14 700Kv che stando ai dati dichiarati, oltre ad essere quasi 80W in più sono anche 20 grammi in meno a motore.
I DYS sono dei bei motori, ne ho acquistati ormai parecchi e, tranne la vecchia serie 22 da 1000Kv che sembravano rane nel pantano, i successivi non hanno mai dato problemi particolari.
Con il risparmio sui motori ho investito qualche euro in più acquistando degli esc da 40A invece che da 30/35 come necessario e poi questa volta ho preferito la tipologia "opto" con firmware SimonK. Ma vediamo un po' di dati tecnici.
Motori: 4x DYS BE2814 700KvSpecifiche:
Kv 700
Configuration 14N12P
Stator Diameter 22mm
Stator Length 17mm
Shaft Diameter 5mm
Propeller mount 6mm
Motor Dimensions(Dia.*Len) Φ35x27.5mm
Weight 100gr
No.of Cells(Lipo) 3-6S
Max Continuous current(A) 22.6A
Max Continuous Power(W) 500W
Wires length 480mm
ROHS and CE
ESC: 4x DYS 40A Opto
Running current:40A(Output: Continuous 40A, Burst 60A up to 10 Secs.)
Input Voltage: 2-6S LiPo
BEC: OPTO
Size: 55mm (L) * 26mm (W) * 13mm (H).
Weight: 39g
With SimonK updated firmware for Multicopter


Il metodo di costruzione seguito è un po' sempre lo stesso, che vede come attrezzo principe il seghetto da traforo con lame di ottima qualità e un trapanino a colonna per la foratura e l'alleggerimento delle parti in alluminio. I riferimenti per il taglio e la foratura sono dati dalla dima autoadesiva ricavata con Corel Draw e una stampantina laser (come si vede dalle foto sotto. Per l'alleggerimento è necessario utilizzare una fresa conica con più diametri di foro disponibili.
Per i supporti dei motori ho utilizzato una vecchia targa di alluminio da 2mm, molto rigido per evitare l'autooscillazione dei motori durante lo sforzo massimo.






Il frame è di tipo H anche se è facilmente riconducibile ad un X di 50cm tra albero e albero opposto. Questo perchè dovendo utilizzare una centralina Naza M Lite (DJ Innovation), che non supporta la configurazione H, avevo il timore di renderlo ingovernabile.
E' una forma molto bella perchè oltre a consentire una facile allocazione di tutta l'elettronica in un ampio spazio centrale, consente di utilizzare lunghezze inferiori per i bracci che spesso sono origine di squilibri e malfunzionamenti... e non solo sull'autocostruito.
Utilizzando per i bracci un profilo quadrato ottengo una maggior superficie di appoggio per il bloccaggio, sicuramente superiore ad un tubolare tondo di carbonio, e rendo semplice la creazione di un perno su cui ripiegare il braccio. Nel mio caso ho utilizzato delle viti a testa piatta in ergal 5MAx30mm con dado autobloccante, di derivazione motociclistica. Per l'altro bloccaggio del braccio, essendo in un punto di minor sforzo, ho utilizzato una semplice vite 3MA serrata da una "farfalla", tutto in acciaio.
Un'altra cosa da tenere d'occhio nella progettazione/realizzazione (che per me spesso si fondono in un unica fase) è lo svergolamento del telaio che crea delle forze di torsione lungo l'asse longitudinale a cui viene applicata la leva dei bracci, contrariamente ad un X i cui bracci concentrano lo sforzo al centro del frame.
E' venuta quindi utile l'aggiunta delle due barre di supporto e raffreddamento dei 4 ESC e l'alloggiamento inferiore della batteria e, se non bastasse, il ponte centrale e il supporto della centralina fanno il resto.
Il ponte centrale è necessario per avere un punto dove collocare l'antenna gps, l'alimentatore della centralina e la ricevente del telecomando. Il supporto della centralina è realizzato in vetronite doppia faccia; una, quella rivolta verso l'alto è stata lasciata integra come schermatura mentre l'altra, quella rivolta verso la batteria è stata sfruttata come hub per l'alimentazione e isolata dalla batteria con un foglio di polietilene da 1mm.





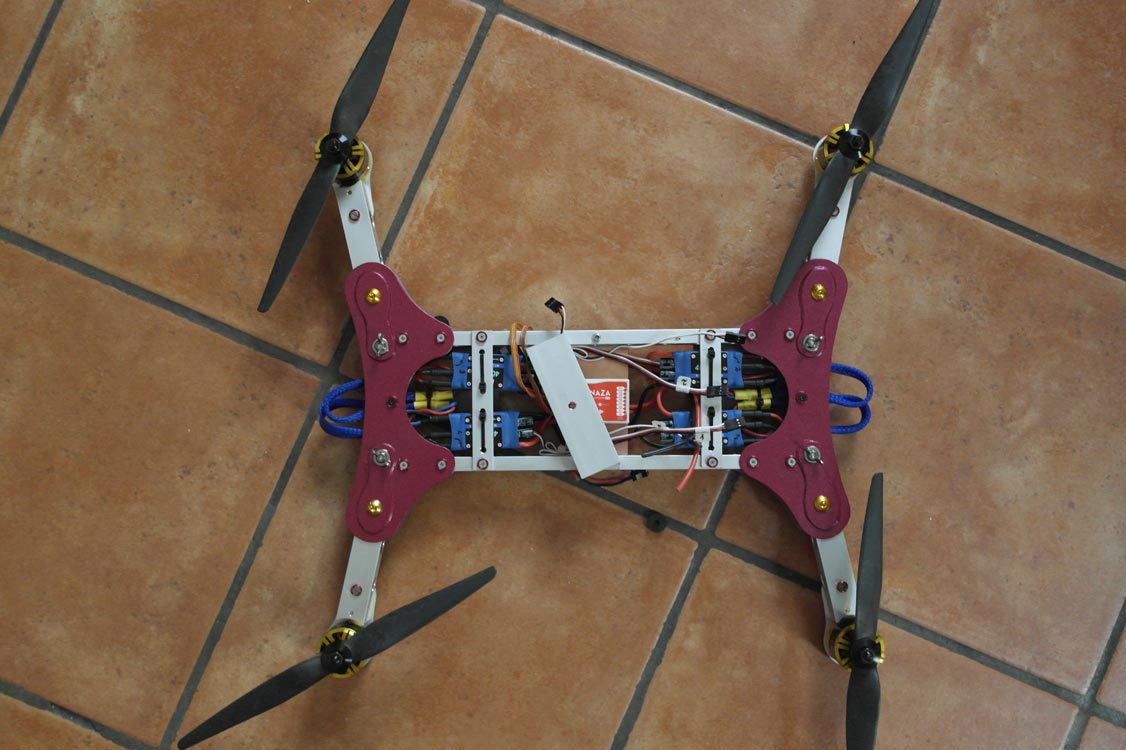
Per puro abbellimento ho verniciato le superfici in vetronite esterne con Rubino metallizzato con cui ho finito anche la chiusura del portabatteria/e (è possibile l'alloggiamento di un ulteriore batteria per la gimbal frontale). Chiudere come ho fatto il porta batterie non è indispensabile, anche se in realtà rinforza la struttura che dovrà supportare anche il carrello; il motivo per cui l'ho fatto è solamente per poter attaccare lo sticker col nome.
Ho aggiunto varie "cosucce" che sicuramente hanno incrementato il peso di un centinaio di grammi che se volete potete tranquillamente omettere ma anche l'occhio vuole la sua parte e problemi particolari di peso credo proprio di non averne con 4 motori da 500W!
Per il momento e per i primi collaudi userò le eliche che vedete nella foto. Sono delle Gemfan nylon/carbonio 10" x 5, un imitazione del profilo lanciato da Graupner e pluri imitato in quanto dimostratosi uno dei più efficienti per i multirotori.
Essendo destinato al "trasporto in bagagliaio" è necessario un minimo di protezione dagli urti e, per quanto possibile, da agenti atmosferici. Inoltre qualche scomparto per i materiali di ricambio non sarebbe male, se poi consentisse anche un facile trasporto... ma cosa sto cercando? Ecco cosa sto cercando: una borsa porta attrezzi Stanley, in robusta cordura e con tutto ciò che occorre. E' bastato solo aggiungere una forma per l'alloggio internamente e rimuovere i due porta cacciaviti cuciti sui fianchi interni che rendevano difficile la sistemazione.








Direi che la realizzazione è completata. Ho lasciato per ultimo la cosa che per me era la più importante, per voi forse meno,.. comprensibile.
Perchè Eloise? Nome insolito per un multirotore...
Semplicemente perchè questa realizzazione ho voluto dedicarla alla mia mamma che da poco è venuta a mancare; è qualcosa da portare sempre con me come il suo meraviglioso ricordo.
Ora un paio di filmati realizzati con la Panasonic LF1. Il primo riguarda le fasi di montaggio, il secondo qualche test di volo.




